엑세스플로어, 개당 20kg으로 무겁고 추락 위험 있어 ‘기피작업’
로봇이 사람 대신 작업 안전사고 막고 높은 품질 확보까지 가능
[비즈월드] 스타크래프트 같은 게임에서나 보던 ‘건설로봇’이 실제 공사 현장에서 활약하고 있다. 건설로봇은 정교한 작업을 일관적으로 수행하는 능력을 갖춘 동시에, 위험한 작업을 대신하며 근로자들의 안전까지 책임지고 있다. 건설업계는 다양한 장점을 두루 갖춘 건설로봇 도입을 위해 기술개발과 특허 등록에 힘쓰고 있다. 비즈월드가 건설업계의 건설로봇 특허를 소개한다. [편집자 주]

삼성물산 건설부문(대표 오세철)이 위험하고 어려운 엑세스플로어 시공을 사람 대신 수행할 ‘엑세스플로어 로봇’을 개발하고 특허 취득에 성공했다.
24일 비즈월드가 특허정보검색서비스 키프리스를 통해 확인한 결과, 삼성물산의 ‘무인로봇을 이용한 액세스플로어 시공방법’은 지난 2020년 6월 출원(출원번호 제1020200080274호)돼 2022년 4월 특허(등록번호 제102388294호)로 등록받았다.
액세스플로어는 반도체·디스플레이·광학·수술실·의약·식품 등 초청정(super-clean) 상태가 필요한 곳에 시공되는 이중바닥이다. 평탄한 바닥 위에 일정 높이의 공간을 두고 바닥을 하나 더 만든다. 바닥 사이 비어있는 공간이 진동을 막고 각종 장비·설비를 설치할 수 있어 정보화시대에 필수적인 바닥구조로 사용된다.
그러나 위험성과 높은 시공 난이도가 단점이다. 액세스플로어 시공은 3~9m 높이에서 진행되기 때문에 추락의 위험이 있다. 플로어 무게도 개당 20kg으로 무겁고 레벨링 난이도도 매우 높아 기피 작업에 해당한다.
삼성물산의 엑세스플로어 로봇은 별도의 인력 투입 없이 엑세스플로어를 시공한다. 사람을 대신해 시공하며 사고를 예방한다. 정교한 작업을 일정하게 수행하는 능력을 갖춰 높은 품질도 확보된다. 공사에 들어가는 비용·기간도 줄인다.
엑세스플로어 로봇은 컨트롤 서버와 유무선으로 연결돼 조작된다. 컨트롤 서버는 로봇 운행을 위한 조작 모듈이다. 로봇 자체에 탑재할 수도 있다.
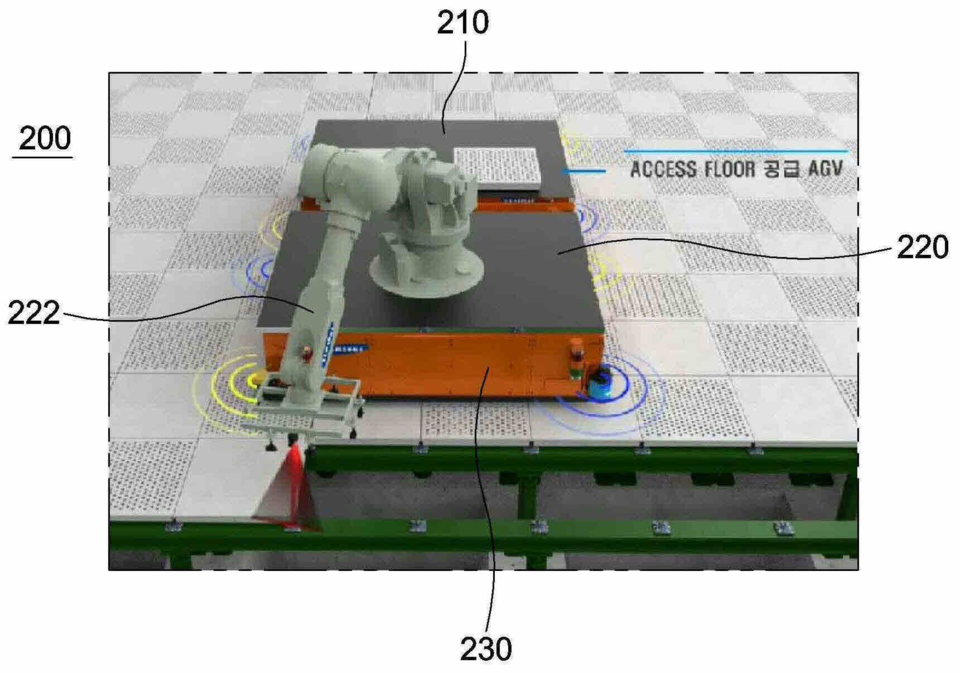
엑세스플로어 시공은 미리 시공된 설치 프레임에 패드 부착, 플로어 거치, 결합 순서로 진행된다. 로봇에 탑재된 ▲패드 설치로봇 ▲플로어 설치로봇 ▲볼팅 로봇이 작업을 수행한다.
패드 설치로봇은 설치 프레임에 패드를 부착한다. 패드의 설치 위치를 감지하는 제1탐지센서, 패드를 설치 위치로 이동시키는 제1설치 암, 제1설치 암을 이동시키는 제1운송수단, 패드 아래쪽에 접착제를 제공하는 접착제 제공부 등으로 구성된다.
플로어 설치로봇은 패드 위쪽에 플로어를 거치한다. 플로어 설치 위치를 감지하는 제2탐지센서, 플로어를 설치 위치까지 이동시키는 제2설치 암, 제2설치 암을 이동시키는 제2운송수단 등으로 구성된다. 플로어를 적재·운송하는 운송유닛도 탑재되지만, 플로어는 개당 20kg이 넘는 고중량 대형 건축자재라 하나의 로봇으로 운송되기 어렵다. 따라서 플로어 운송 로봇을 따로 둬 근방에서 운송하게 한다.
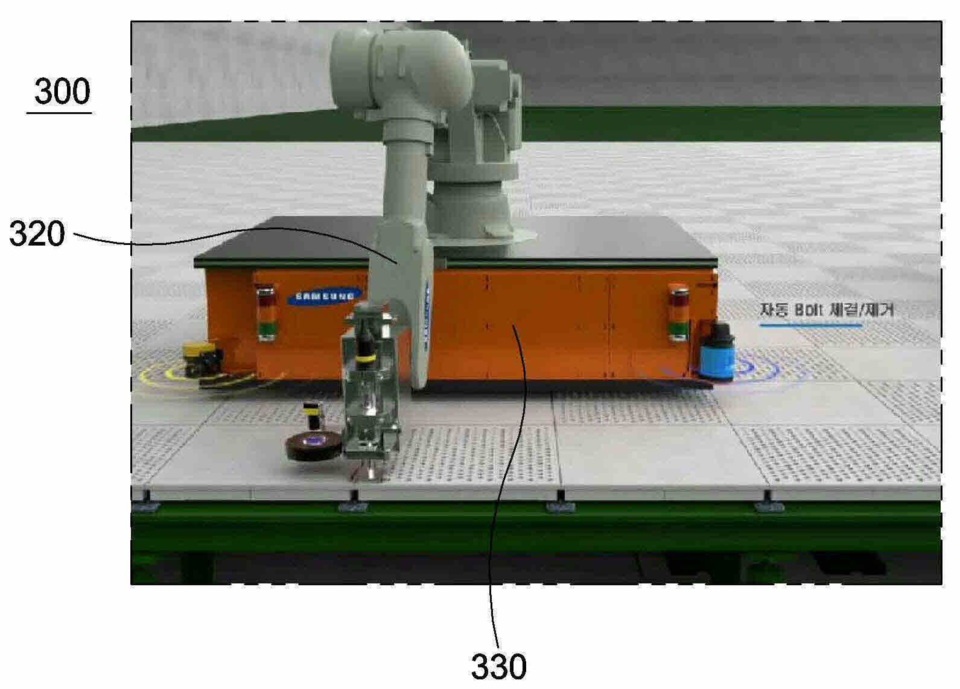
볼팅 로봇은 패드와 플로어를 결합한다. 결합수단(볼트)이 삽입될 삽입홀(패드·플로어)을 감지하는 제3탐지센서, 결합수단을 삽입홀까지 이동시키는 제3설치 암, 제3설치 암을 이동시키는 제3운송수단, 볼트를 삽입홀에 결합하는 볼팅부 등으로 구성된다.
시공은 ▲1단계 : 설치 프레임과 주변부 슬래브 시공 ▲2단계 : 주변부 슬래브에 무인로봇 위치 ▲3단계 : 무인로봇이 주변부 슬래브를 따라 이동하며 플로어를 설치 프레임에 결합 등으로 진행된다.
3단계는 세부적으로 패드 설치로봇으로 설치 프레임에 패드 부착, 플로어 설치로봇으로 패드에 플로어 거치, 볼팅 로봇으로 패드와 플로어 결합 등으로 진행된다.
로봇은 설정된 방향을 따라 3단계를 반복 수행하며 엑세스플로어를 시공한다. 주변부 슬래브가 높은 층에 형성되는 경우 로봇을 운송하는 승강시설 시공이 필요하다.
시공은 여러 대의 로봇을 투입해 빠르게 진행될 수 있다. 각각의 로봇에 장착된 위치센서와 거리센서를 통해 로봇의 위치·거리·작업 등을 조종할 수 있다.
볼팅 로봇에 수평도를 측정하는 수평도 측정부를 설치하면 높은 수준의 수평도 품질을 확보할 수 있다.
삼성물산 관계자는 “엑세스플로어 로봇은 회사가 수주한 반도체·디스플레이 현장에서 실제로 활약하며 안전사고 예방과 비용 절감·공기 단축에 기여하고 있다”며 “회사는 빠르고 품질 높은 시공과 더불어 위험한 작업을 대신할 수 있는 로봇 개발·투입에 적극 나서겠다”고 말했다.
[비즈월드=나영찬 기자 / na@bizwnews.com]
관련기사
- [건설로봇 특허] 삼성물산, 스스로 이동하며 불 끄는 ‘지능형 소화 로봇’ 특허 등록
- [건설로봇 특허] 현대엔지니어링, 까다로운 ‘대규모 바닥 미장’ 로봇으로 해결한다
- [건설로봇 특허] 현대엔지니어링, 스스로 움직이며 바닥 평탄화하는 ‘미장로봇’ 개발
- [건설로봇 특허] “위험한 곳 물러나세요!”… 현장 안전 지키는 대우건설의 ‘스마트 대차’
- [건설로봇 특허] 삼성엔지니어링, 어렵고 위험한 배관 작업 대신할 ‘배관 접합 로봇’ 개발
- [건설로봇 특허] ‘비정형 건축, 로봇으로 혁신’… 현대엔지니어링의 3D 로봇 조형기술
- [건설로봇 특허] 안전 사각지대 드론으로 해결… 현대엔지니어링 ‘자율 주행드론’ 특허 확보
- [건설로봇 특허] 까다로운 파이프 용접, 로봇으로 자동화… 삼성엔지니어링, 특허 취득
- [건설로봇 특허] 롯데건설, 현장 안전·공정 ‘무인 이동체’로 파악한다
- [건설로봇 특허] 현대엔지니어링, 실외기 과열 화재 막을 ‘드론 점검 시스템’ 개발
- [건설로봇 특허] 무거운 배관로봇 안전하고 손쉽게 투입… 삼성엔지니어링, ‘투입 장치’ 개발
- [건설로봇 특허] 현대엔지니어링, 바람 불어도 착 붙어 페인트칠하는 ‘도장로봇’ 개발