초소형 구동 로봇 제작에 활용 가능성 커…의료용 로봇 개발에 청신호
[비즈월드] 최근 들어 로봇 기술이 급격하게 발전함에 따라 산업용 로봇, 의료용 로봇, 군사용 로봇, 가정용 로봇 등과 같은 다양한 종류의 로봇이 광범위한 분야에서 널리 사용되고 있다.
지금까지 우리가 알고 있는 주행로봇의 형태는 본체 아래 바퀴가 전기 모터로부터 추진력을 얻어 이동하거나 여러 개의 다리가 유압 또는 공기 압력이 실린더에 가해져 각 다리가 균형을 잡고 순차적으로 받으면서 움직이는 형태였다.

대표적으로 상업화가 이뤄진 것이 바로 배달의민족을 운영하는 우아한형제들이 렌털사업을 벌이고 있는 서빙로봇이다.
2019년 11월 국내 최초로 일반 식당에 자율주행형 서빙로봇 렌털 프로그램을 선보인 우아한 형제들은 최근까지 전국 각지의 총 48곳 식당에서 65대의 서빙로봇인 딜리플레이트를 렌털해줬다.
이달 20일에는 설치 환경에 제약이 적고 적재 규모가 큰 프리미엄 모델 ‘딜리플레이트L01’과 카페나 소규모 식당 서빙에 용이한 ‘딜리플레이트K01’ 등 신규 로봇 2종을 추가해 총 3개 기종으로 확대했고 연말까지 300대 공급을 목표로 하고 있다는 계획을 발표했다.

앞서 우아한형제들 측은 LG전자와 손잡고 배달로봇 상용화에도 나섰다. 지난해 11월 18일부터 25일 동안 건국대 캠퍼스에서 실외 자율주행 배달로봇을 테스트한 결과 동일한 형태의 이 로봇들은 2219건의 주문을 성공적으로 처리했다. 총 주행거리는 서울-부산을 2번 왕복한 것과 같은 총 1250㎞에 달했던 성과를 바탕으로 한 것이다.
그런데 이런 유형의 이동 로봇은 너무 크고 무겁기 때문에 로봇이 소형화될수록 사용 개수가 제한되고 이로 인해 로봇의 성능을 제한하는 요인이 될 수 있었다.
특히 최근 들어 의료, 탐사 등 다양한 분야에서 초소형 로봇에 대한 요구가 증대하고 있는 추세이므로 초소형 로봇에 적용할 수 있는 새로운 유형의 액츄에이터(Actuator) 또는 구동방식을 개발할 필요성도 점차 커지고 있는 실정이다.
이런 가운데 최근 한국기술교육대학교 산학협력단(이하 한국기술교대)이 전혀 새로운 형태로 움직이는 로봇에 대한 신기술을 개발해 눈길을 끌고 있다.
바로 2019년 11월 18일 출원(출원번호 제1020190147531호)해 지난 7월 13일 등록(등록번호 제102135533호)을 받은 ‘스마트 물질 기반 다족 이동 로봇’ 특허가 그것이다.
한국기술교대 측은 해당 발명에 대해 “전극 간의 정전기력에 의해 추진력을 생성하는 다족 이동 로봇에 관한 것이다”라고 정의했다.
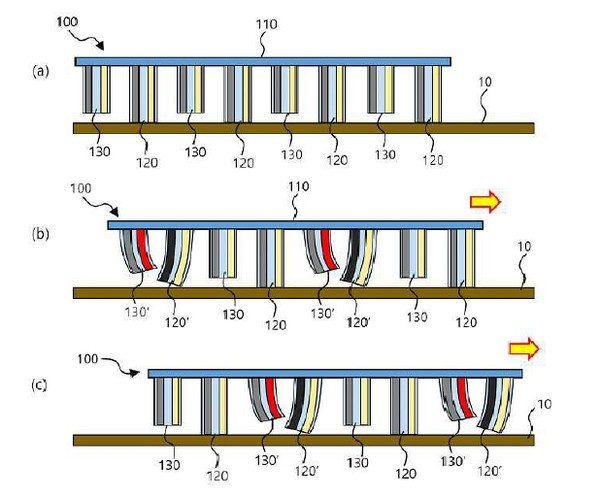
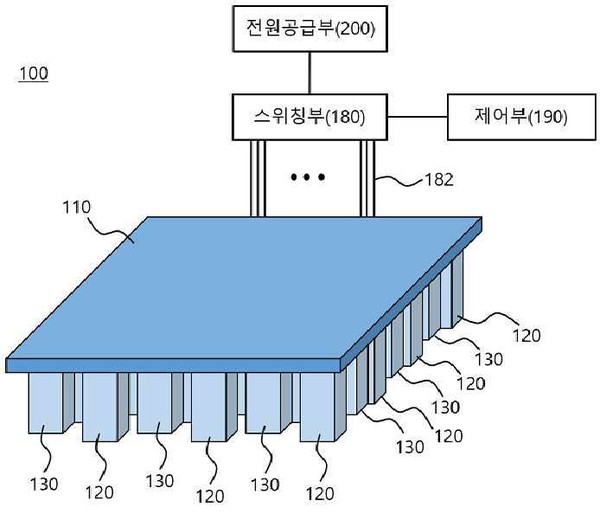
그러면서 “본 발명에 따른 다족 이동 로봇은, 다리지지부: 각각 탄성체와 탄성체에 결합된 다수의 전극을 구비하며, 상단은 상기 다리지지부에 결합되는 다수의 구동다리; 각각 탄성체와 탄성체에 결합된 다수의 전극을 구비하고, 상단은 상기 다리지지부에 결합되되 상기 구동다리에 비하여 짧은 길이를 가지며, 상기 다수의 구동다리 중에서 적어도 하나의 구동다리에 인접하는 다수의 보조다리를 포함하며, 서로 인접한 구동다리의 전극과 보조다리의 전극 간에 정전기력을 발생시키면 구동다리가 구부러짐에 따라 구동다리의 하단부와 바닥 간의 마찰 저항에 의해 구동다리가 구부러지는 방향의 반대쪽으로 추진력이 발생한다”라고 설명했다.
이어 “본 발명에 따르면 전극 간의 정전기력을 이용하여 추진력을 생성하는 새로운 유형의 다족 이동 로봇을 제공할 수 있다. 또한 전기활성폴리머를 이용해 다족 이동 로봇의 다리 높이를 간편하게 조절할 수 있고 추진력도 생성할 수 있는 새로운 유형의 다족 이동 로봇을 제공할 수 있다”라고 강조했다.
이 발명에 따른 로봇의 다리는 바퀴나 실린더 압력으로 움직이지 않는 것이 기존의 로봇과 가장 큰 차이점이다.
구체적으로는 전기활성 폴리머(Electro active Polymer, 이하 EAP) 등과 같은 스마트 물질을 이용해 다리를 동작시키는 원리다.
여기서 ‘EAP’란 전기가 통하면 수축하는 성질을 갖는 ‘전기활성 고분자’를 의미한다. 근육의 움직임이 필요한 장애인용 인공 팔다리와 비행선의 날개, 인공심장판막, 물고기 로봇 등의 인공피부에 활용된다.
EAP는 전기적인 자극에 의해 변형을 할 수 있는 고분자 재료를 통칭하는데, 넓게는 전기적인 자극뿐만 아니라 화학적 자극이나 열적 자극 등에 의해 변형되는 고분자 재료도 EAP에 포함하기도 한다.
EAP는 전기장에 의해 수축, 팽창, 굽힘 등의 변형이 발생하고 전기장이 제거되면 자체 탄성에 의해 본래 형상으로 복원되는 특성을 갖는 고분자 물질이라고 이해하면 된다.
EAP의 종류로는 이온 폴리머 금속 복합물(Ionic Polymer Metal Composite, IPMC), 유전성 탄성중합체(dielectric elastomer), 도전성 폴리머(conducting polymer), 폴리머 젤(polymer gel), PVDF(Polyvinylidene Fluoride) 수지, 탄소 나노튜브(carbon nanotube), 형상 기억 폴리머(shape memory polymer) 등이 있다.
EAP는 전기 에너지를 기계적인 에너지로 전환하는 동력전달기구인 엑츄에이터(actuator)의 재료로 널리 활용되고 있다. 예를 들어, EAP 엑츄에이터는 액체 렌즈(fluidic lens), 마이크로 카메라(micro camera), 폴리머 MEMS(polymer Micro Electro Mechanical Systems), 바이오 시스템(bio system), 에너지 수확기술(energy harvesting) 등과 같은 다양한 활용 분야를 가지고 있다. EAP는 엑츄에이터 외에도 센서(sensor), 커패시터(capacitor), 다이어프램(diaphragm) 등과 같은 디바이스의 제조에 활용되고 있다고 한다.
EAP 엑츄에이터는 변형율이 최대 5% 이상으로서 다른 엑츄에이터(예컨대, 세라믹 압전 엑츄에이터는 변형율이 최대 0.2% 수준이다)에 비해 변형율이 크다는 것이 장점으로 이번 특허에 활용된 주요 원이 됐다.
따라서 EAP 엑츄에이터는 소형으로 제작하더라도 상대적으로 큰 변위의 구동을 얻을 수가 있다.
해당 발명의 이동 원리는 각각 다수의 전극과 상기 다수의 전극 사이에 배치되고 하단부가 상기 다수의 전극보다 하부로 돌출되는 전기활성폴리머 기둥을 구비하며 상단은 상기 다리지지부에 결합되는 다수의 구동다리를 포함하며, 상기 다수의 구동다리 중에서 선택된 적어도 하나의 구동다리에 구비된 다수의 전극 중에서 서로 마주 보는 제1 전극 및 제2 전극에 서로 반대 극성의 전원을 연결하면 상기 전기활성폴리머 기둥이 상기 제1전극을 향해 구부러짐에 따라 상기 전기활성폴리머 기둥의 하단부와 바닥 간의 마찰 저항에 의해 상기 전기활성폴리머 기둥이 구부러지는 방향의 반대쪽으로 추진력이 발생하는 것을 특징으로 한다.
해당 기술이 접목된 로봇이 등장하게 되면 아서 설명한 것과 같이 초소형 이동로봇의 제작이 가능해지게 된다.
또 이 로봇에 자율주행 기능을 추가하게 되면 산업 전반에 활용이 가능해지고 의료용 등으로 인체 내부의 발병 원인물질을 찾아 제거할 수 있는 의료용 로봇 생산 적용도 가능할 것으로 예상되고 있다.
관련기사
- [단독] “이제 불법 전화 원천 봉쇄”…KT, ‘불법 전화 검출을 위한 장치 및 방법’ 신규 특허 취득
- [단독] 삼성전자, 5G 관련 진정한 '전 세계 특허 왕좌' 등극 …노키아의 통신 관련 세계 특허 500여건 인수
- [단독] “몸에 좋은 ‘복분자주’, 최대 단점은 ‘숙취’”…하이트진로, 숙취 원인 메탄올 줄이는 복분자주 제조방법 특허 취득 “레트로 제품 출시 여부 관심”
- [단독] 특허청, ‘특허빅데이터담당관’ 신설…정작 민원인이 이 부서 업무협조 원해도 드러나지 않는 ‘유령조직’
- [단독] 개인 투자 특허 크라우드펀딩 1호 상품 ‘초대박’…‘HEVC’ 기술 앞세운 와이즈핀 , 와디즈 출시 2일 만에 목표액 대비 207%↑
- [단독] “신동빈 회장, 롯데마트 사업 접으시나요?”…‘고객 서비스는 뒷전’, 허접·부실한 사이트 운영으로 고객 불만 ‘속출’
- [단독] “코로나19 중증 악화 위험 1.3배↑”…신명메디에스, 당뇨환자를 위한 ‘휴대용 인슐린 주입기 및 그 휴대용 인슐린 주입기의 비정상 작동 알람 방법’ 특허 취득
- [단독] “유선이어폰이 보조배터리가 된다?!”…LG전자, 출원 6년 만에 ‘이동 단말기’ 특허 취득
- [단독] “작업자와 대화하는 스마트헬멧, 현장의 위험상황 알린다”…무하기술, 안전 도움 주는 스마트헬멧 특허 취득
- [단독, 글로벌 IP] ‘진일보한 전기 스쿠터의 개발’…BMW, 지난달 15개의 특허 유럽특허청에 잇달아 출원
- [Weekly IP] ㈜스템랩(2건) ㈜노브메타파마 라온피플㈜ 코스맥스㈜ ㈜프로스테믹스 ㈜코스메카코리아 펨토바이오메드 ㈜시큐브
- [단독, 글로벌 IP] 올해 상반기 대만 내 특허출원 내·외국기업 1위는 TSMC·퀄컴…삼성전자, 114건 출원으로 전년 동기 比 –20%