[비즈월드] 3차원 거리 측정 시스템은 CCD(Charge Coupled Device) 이미지 센서, CMOS(Complementary Metal Oxide Semiconductor) 이미지 센서, 초음파 센서, 레이저 센서 등 다양한 센서를 이용해 공간의 거리를 측정하게 됩니다.
통상의 3차원 거리 측정 시스템은 센서의 중심을 포함한 평면을 스캔하는 2차원 거리 센서를 회전시켜 공간을 스캔합니다. 이런 2차원 거리 센서를 이용한 장치는 비용, 크기와 샘플링 레이트를 제한하지 않기 때문에 연구 목적이 아닌 상용제품으로 생산하는 데 한계가 있습니다.
2차원 광 다이오드 어레이(Photodiode Array)가 적용된 장치는 구조광(Structure Light) 또는 비행시간(Time of Flight)을 이용해 거리를 측정합니다. 구조광은 고유 패턴을 투사하고 대응점을 검출, 깊이를 계산하는 방식이고 비행시간은 시간차 또는 위상차를 측정해 거리로 변환하는 방식입니다.
2차원 광 다이오드 어레이가 적용된 장치는 화각을 넓히기 어렵고 픽셀마다 갖는 3차원 정보가 많아 핀 포인트 측정이 힘든 문제가 있습니다.
1차원 광 다이오드 어레이가 적용된 거리 측정 장치는 광 다이오드 어레이 및 레이저 다이오드 어레이(또는 레이저 다이오드와 디퓨저)를 포함합니다. 광 다이오드 어레이는 실리콘 결정 위에 직선형으로 수백 내지 수천 개의 광 다이오드를 배열한 구조를 가지게 됩니다. 1차원 광 다이오드 어레이가 적용된 거리 측정 장치는 화각을 넓히기 어렵고 구현에 필요한 고효율의 디퓨저(Diffuser), 센서 어레이, 멤스 거울(Mems Mirror) 등의 모듈들이 가격이 비싸 상용제품으로 생산하는 데 곤란한 문제가 있습니다.
이런 가운데 ㈜유진로봇은 2월 6일 ‘이동성 거울을 이용한 광 송수신기, 3차원 거리측정장치 및 이동체’라는 명칭의 특허를 취득(등록번호 제102076478호)했다고 공시했습니다. 이 특허는 2017년 10월 23일 출원(출원번호 제1020170137723호)됐습니다.
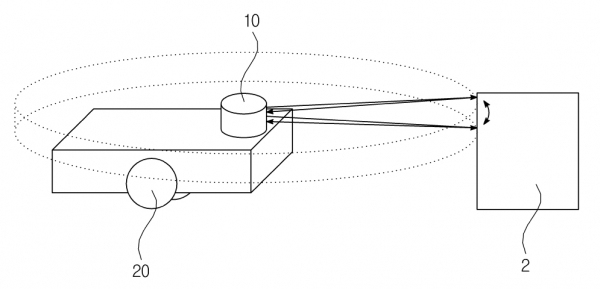
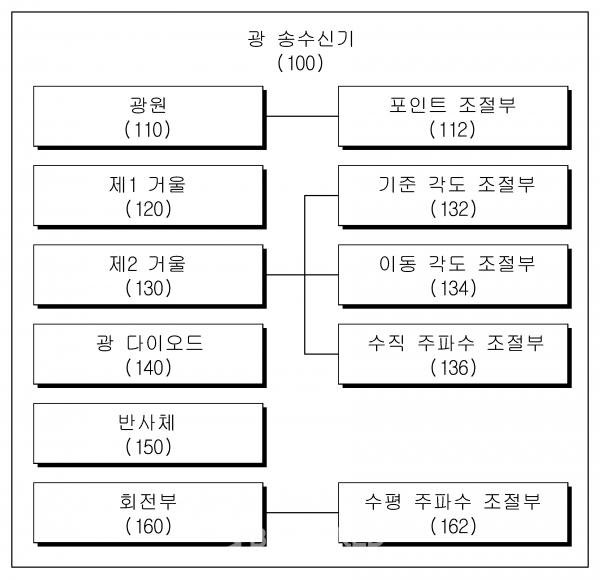
회사 측은 이 특허에 대해 “3D LIDAR(라이다)에 관한 기술로 광원으로부터 출사된 광을 통과시키는 홀을 포함하며, 곡면으로 형성된 반사면에 반사된 광선이 모이는 초점을 갖는 제1거울 및 제1거울의 홀을 통과한 광을 대상체로 반사하고 대상체로부터 반사된 광을 수신해 제1거울로 반사하며 수직방향으로 움직이는 제2거울을 포함함으로써 어레이 타입을 사용하지 않으면서 제품의 크기와 비용을 최소화하고 고성능으로 핀 포인트를 측정할 수 있는 광 송수신기 3차원 거리 측정장치 및 이동체를 제공한다”면서 “해당 기술은 기존의 2차원 라이다기술 또는 다채널 라이다 기술에 비해서 더욱 조밀한 정보를 제공하고 광역의 환경정보를 획득할 수 있는 장점이 있다”라고 설명했습니다.
특허 공개전문에서도 “본 발명의 실시예들은 (i)광원으로부터 출사된 광을 통과시키는 홀을 포함하며 곡면으로 형성된 반사면에 반사된 광선이 모이는 초점을 갖는 제1거울과 (ii) 제1거울의 홀을 통과한 광을 대상체로 반사하고 대상체로부터 반사된 광을 수신해 제1거울로 반사하며 수직 방향으로 움직이는 제2거울을 포함함으로써, 어레이 타입을 사용하지 않으면서 제품의 크기와 비용을 최소화하고 고성능으로 핀 포인트를 측정하는 데 발명의 주된 목적이 있다”라고 밝혔습니다.
이어 “본 발명의 명시되지 않은 또 다른 목적들은 하기의 상세한 설명과 그 효과로부터 용이하게 추론할 수 있는 범위 내에서 추가적으로 고려될 수 있다”라고 덧붙였습니다.
이를 위해 유진로봇은 광을 출사하는 광원, 상기 출사된 광을 통과시키는 홀을 포함하는 제1거울, 상기 제1거울의 상기 홀을 통과한 광을 대상체로 반사하고 상기 대상체로부터 반사된 광을 수신해 상기 제1거울로 반사하는 제2거울과 이 거울로부터 반사된 광을 수신해 전기 신호로 변환하는 광 다이오드를 포함하는 광 송수신기를 제공하는 것으로 해결 방안을 제시했습니다.
유진로봇 측은 “이 특허 기술이 물류이송 로봇 등 자율 주행에 적용될 경우 로봇의 동선상에 위치한 물체를 사각지대 없이 감지할 수 있어 안전이 확보되며 추가적인 센서 없이 안전 주행이 가능하고 로봇의 안정성과 가격 경쟁력을 제공할 수 있다”면서 “산업용으로 사용되는 협동로봇에 적용할 경우 작업자와의 협동작업을 할 수 있도록 도와주는 안전센서의 역할이 가능해 4차 산업시대에 광범위하게 활용이 가능한 기술로 이용할 예정이다”라고 설명했습니다.